Cette fiche présente une activité déconnectée initiant les participant.e.s à la robotique.
Objectif général
Temps de préparation pour l'animateur
Domaine de compétence
Temps requis pour compléter l'activité (pour l'apprenant)
Nom de l'auteur
Matériel supplémentaire
Ressource originellement créée
Présentation
L’objectif de cette fiche est de faire comprendre aux participant.e.s comment fonctionnent les robots, notamment en les sensibilisant sur l’origine des capteurs et leur lien avec l’algorithmie robotique.
Note à l’animateur.rice : Pour la préparation, relier avec du scotch quelques feuilles et placer l’ensemble sur la table de façon à avoir une zone de dessin relativement grande (elle ne doit pas nécessairement être en rectangle/carré).
Mise en situation : la fonction des capteurs
Commencer par un petit exercice de mise en situation, pour faire comprendre à quoi servent des capteurs.
Réunir les participant.e.s autour de la table et les inviter à dessiner (sur les feuilles préparées) un seul parcours simple, avec deux ou trois virages, un croisement et une arrivée face à un obstacle.
exemple :

Demander à un.e des participant.e.s de faire rouler la petite voiture sur ce parcours, en verbalisant ce qu’ielle fait (« je suis la route », « je tourne à droite », …), en s’arrêtant si un obstacle ou une fin de route est rencontré.
Demander au groupe pourquoi la personne qui pilotait la voiture a tourné et s’est arrêtée, etc.
Réponse attendue : parce qu’elle a vu le virage, l’obstacle, et a décidé de suivre la route et s’arrêter.
Comment savait-elle qu’il y avait un virage, obstacle, etc ?
Réponse attendue : Parce qu’elle l’a vu, elle a capté l’information avec ses yeux.
Définition et autres types de capteurs
Il s’agira à présent de poursuivre avec les questions guidées pour explorer la notion de capteur plus loin.
Leur demander de poser la main sur la table, de fermer les yeux et de trouver le bord.
Comment s’en sont-ils aperçus ? Quel est le capteur utilisé ?
Explication : grâce au toucher, je détecte le bord de la table, j’en conclus que je dois arrêter mon bras.
Dans la voiture de l’exercice précédent, quels éléments peuvent servir de capteurs ?
Explication : Notre petite voiture peut utiliser ses roues comme des capteurs : une roue touche ou non la route. La voiture peut détecter les obstacles en calculant la distance qui la sépare d’un mur. Si vous avez un distancemètre, faites leur mesurer la distance au mur d’en face. Refaire le circuit en leur demandant de décrire l’action des capteurs : la voiture avance tout droit tant que les roues sont sur la route. Si une roue sort de la route, c’est qu’il y a un virage et qu’il faut tourner le volant. Si la voiture détecte un mur, elle sait qu’elle doit s’arrêter.
Mise en pratique : les participant.e.s jouent les capteurs
Demandons à présent aux participant.e.s de jouer le rôle des capteurs.
Les consignes sont les suivantes : lever la main gauche quand la roue gauche sort de la route, lever la main droite quand c’est la roue droite. Les participant.e.s doivent comprendre que lorsque la roue gauche sort de la route, il faut tourner à droite, et inversement.
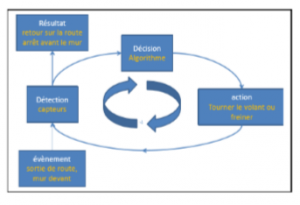
Continuer l’exercice pendant quelques minutes jusqu’à ce qu’ielles maîtrisent l’enchaînement entre la détection d’un événement (capteur), la décision prise (algorithme), l’action (tourner le volant ou freiner) et le résultat obtenu qui est de revenir sur la route ou de s’arrêter avant le mur.
 Mettre en avant le déroulé qui vient d’avoir lieu : détection par le capteur, prise de décision, action.
Mettre en avant le déroulé qui vient d’avoir lieu : détection par le capteur, prise de décision, action.
En fait, ce qu’ielles viennent de réaliser, c’est la même chose qu’il se passe avec des robots ; ce qui change, c’est la nature et le fonctionnement des capteurs (pression, caméra avec analyse d’image, laser, gyroscope,…).
Faire le lien avec les connaissances du groupe sur les algorithmes : de quel genre d’algorithmes pourrait bien avoir besoin une voiture robot ? Il en faut pour traiter les informations captées par les senseurs (analyse des images d’une caméra, récupération de la mesure du laser), un pour prendre des décisions, et des pour déclencher les moteurs (faire tourner les roues, accélérer,…)
Point théorique
Mettre à plat les notions découvertes avec l’expérimentation.
Écrire l’algorithme au tableau puis refaire le parcours en suivant son déroulement au tableau avec en pas à pas:
- Une personne qui fait avancer la voiture
- Une personne qui joue le rôle des capteurs
- Une personne qui change l’état du capteur dans la colonne centrale
- Une personne qui déroule l’algorithme et qui exécute en mettant à jour l’état moteur/volant
- Une personne qui dit au conducteur ce qu’il doit faire.
Le conducteur peut avoir les yeux bandés (ne pas voir la route) et celui qui déroule l’algorithme doit avoir le dos au circuit.

Pour aller plus loin
A présent, le groupe devrait être apte à comprendre le fonctionnement de robots simples et passer à des activités branchées.
Il est aussi possible de réaliser les premiers niveaux de Blockly Maze pour exercer les notions de spatialisation et de programmation.
Conseil médiation
Pour aller plus plus loin sur le sujet, nous vous conseillons de vous référer à la fiche outil « Algorithmes et langages de programmation » mais également celle « Histoire des robots et les outils pour s’initier à la robotique« .